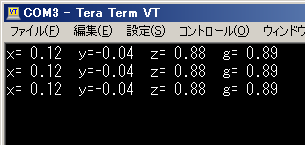
3軸加速度センサー・モジュール ADXL345(秋月電子通商)を使用して、加速度のx、y、z成分(±2gの範囲)と加速度の大きさg=√(x*x+y*y+z*z)の値をTera Termでパーソナル・コンピュータ(PC)上に表示します。
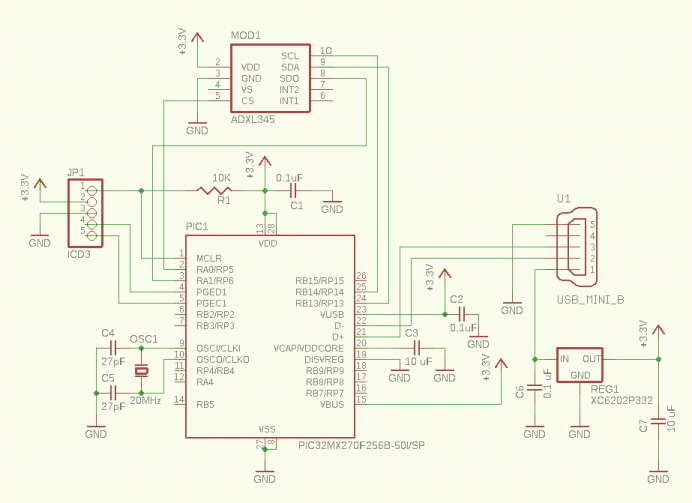
回路図と実際の回路を以下に示します。
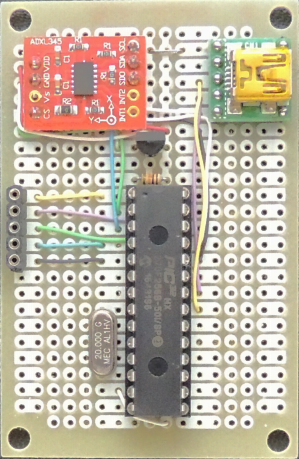
PICとADXL345(以下ADXLと書きます)の接続は、以下の通りです。
PIC2番ピン(CS)-ADXL(CS)
PIC3番ピン(SDI1)-ADXL(SDO)
PIC24番ピン(SDO1)-ADXL(SDA)
PIC25番ピン(SCK1)-ADXL(SCL)
ADXL(VDD)ー3.3V
ADXL(GND)ーGND
1.PIC32MX270F256B-50I/SP (HARMONY)の章の項目「MHC環境」に書かれているようにMHC環境を整えます。
2.PICに書き込むファームウェアはMX270_gravity_cdc.zipです。このファームウェアは、Harmony3\usb_apps_device\apps\cdc_com_port_singleを手直しし、それに、加速度センサとデータを送受信するためのコード(SPI規格)を付け加えたものです(app.c)。MX270_gravity_cdc.zipを解凍して出てくるMX270_gravity_cdcフォルダーをHarmonyProjectsフォルダーの中に入れます。以下の図は、SPIの設定の様子です。
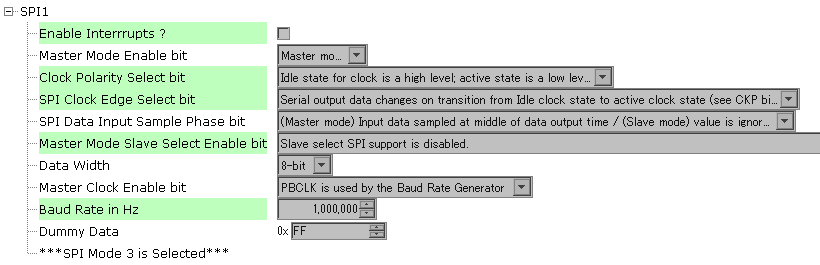
なお、SPI用のピン設定時における注意事項を、MX270_gravity_cdcフォルダーの中のreadme.txtファイルに書いて置きました。
3.PIC基板とPCをUSBケーブルで接続して、ファームウェアをPICに書き込みます(PIC基板がCDC機器になります)。
4.Windows10(21H2)では、CDC用標準デバイスドライバ(Usbser.sys)を使用するようです。つまり、PIC基板とPCをUSBケーブルで接続すると自動的にこのドライバーが組み込まれまれるようです(別途ドライバーを組み込む必要がない)。デバイスドライバが組み込まれると以下のような画面がしばらく表示されます。画面からポート番号はCOM3ということが分かります。

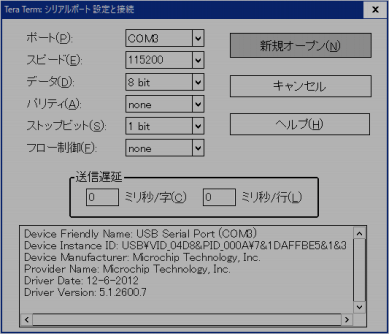
5.PC上でTera Termを起動して、メニューから”設定->シリアルポート”を選択すると、シリアルポート設定画面が以下の様に現れるので、ボーレートを115200 bps、データビットを8ビット、 パリティはなし, ストップビットを1、フロー・コントロールはなし、と設定してください。 設定が終わったら、シリアルポート設定画面を閉じ、メニューから”設定->設定の保存”を選択して、シリアルポート設定内容をファイルに保存しておくと、次回の接続時には、自動的に保存した設定内容が反映されます。
6.キーボードから適当なキーを押下すると、その度に、計測された加速度(静止状態では重力加速度[1に規格化されている])のx、y、z成分(±2gの範囲)とg=√(x*x+y*y+z*z)の値が以下の図の様に表示されていきます。なお、座標軸は加速度センサモジュール基板に書かれてありますが、各軸の正の方向が逆です。